Language peer sets for AL:
United States↑
United States/1969↑
Designed 1969 ↑
1960s languages ↑
Third generation↑
High Cold War↑
Genus Structure-oriented ↑
Specialised Languages ↑
Structure-oriented↑
Robotics↑
Physical control ↑
Structure-oriented/1969↑
Robotics/1969↑
Physical control/1969↑
Structure-oriented/United States↑
Robotics/United States↑
Physical control/United States↑
Specialised Languages ↑
Specialised Languages/1969↑
Specialised Languages/us ↑
AL(ID:486/al:001)
Assembler for robots
alternate simple viewCountry: United States
Designed 1969
Published: 1969
Genus: Structure-oriented
Sammet category: Specialised Languages
for Assembly Language and Arm Language (because it was first used for the arm)
Standford Research Institute 1969
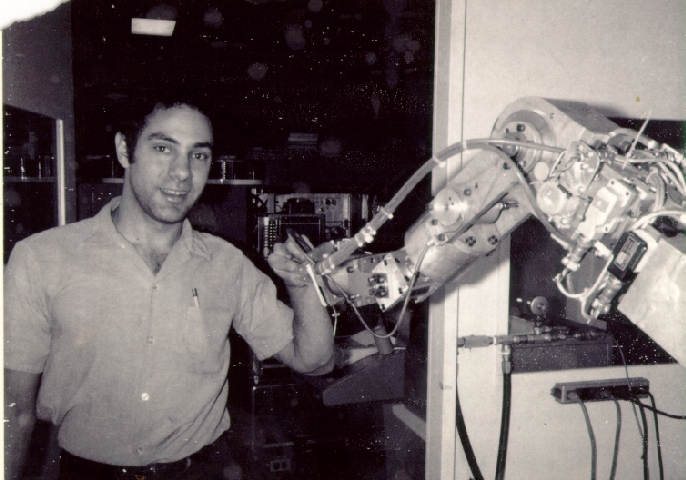
Robotic language for the Stanford Arm, developed by Victor Scheinman at SAIL. It was a small electrically-controlled arm, with six degrees of freedom. AL was used to descibe the mathematical functions which the arm would then fit.
Despite its name, AL was an ALGOL 60 derivation.
The technology was transferred to Karlsruhe in 1980 to be made into a new higher level language
Places
Related languages
| ALGOL 60 | → | AL | Based on | |
| WAVE | → | AL | Evolution of | |
| AL | → | Karlsruhe AL | Evolution of | |
| AL | → | SRL | Based on |
References:
in (1979) Langages et Methods de Programation des Robots Industriels, IRIA Press 1979
in (1979) Langages et Methods de Programation des Robots Industriels, IRIA Press 1979
in (1979) Langages et Methods de Programation des Robots Industriels, IRIA Press 1979
in (1979) Langages et Methods de Programation des Robots Industriels, IRIA Press 1979
in (1979) Langages et Methods de Programation des Robots Industriels, IRIA Press 1979
in (1979) Langages et Methods de Programation des Robots Industriels, IRIA Press 1979
in (1979) Langages et Methods de Programation des Robots Industriels, IRIA Press 1979
in (1979) Langages et Methods de Programation des Robots Industriels, IRIA Press 1979
in (1979) Langages et Methods de Programation des Robots Industriels, IRIA Press 1979
in Kosinski, M.S. (1976) Kosinski, M.S. "SPL/I Language Reference Manual" Intermetrics Report 172-1 (July 1976).
in [PFT] (1981) [PFT] Verbesserte Programmiemng von Robotern in der Montage [Improved Programming of Robots in Assembly] PFT-Entwicklungs-notiz Karlsruhe (1981)
in Machine Intelligence 10, J.E. (1982) Machine Intelligence 10, J.E. Hayes, Donald Michie, and Y-H. Pao, editors, Ellis Horwood Ltd., Chicester, England, 1982.
in [PFT] (1981) [PFT] Verbesserte Programmiemng von Robotern in der Montage [Improved Programming of Robots in Assembly] PFT-Entwicklungs-notiz Karlsruhe (1981)
in [PFT] (1981) [PFT] Verbesserte Programmiemng von Robotern in der Montage [Improved Programming of Robots in Assembly] PFT-Entwicklungs-notiz Karlsruhe (1981)
in [PFT] (1981) [PFT] Verbesserte Programmiemng von Robotern in der Montage [Improved Programming of Robots in Assembly] PFT-Entwicklungs-notiz Karlsruhe (1981)
in [PFT] (1981) [PFT] Verbesserte Programmiemng von Robotern in der Montage [Improved Programming of Robots in Assembly] PFT-Entwicklungs-notiz Karlsruhe (1981)
in [PFT] (1981) [PFT] Verbesserte Programmiemng von Robotern in der Montage [Improved Programming of Robots in Assembly] PFT-Entwicklungs-notiz Karlsruhe (1981)
Resources
- Page at computer museum
-
Display at Stanford The kinematic configuration of the arm is non-anthropomorphic (not humanoid) with 6 joints (5 revolute, 1 prismatic) and links configured such that the mathematical computations (arm solutions) were simplified to speed up computations. Brakes were used on all joints to hold the arm in position while the computer computed the next trajectory or attended to other timeshared activities. Drives are DC electric motors, Harmonic Drive and spur gear reducers, potentiometers for position feedback, analog tachometers for velocity feedback and electromechanical brakes for locking joints. Slip clutches were also used to prevent drive damage in the event of a collision. Other enhancements include a servoed, proportional electric gripper with tactile sense contacts on the fingers, and a 6 axis force/torque sensor in the wrist.
-
Image at Staford
Search in: Google Google scholar World Cat Yahoo Overture DBLP Monash bib NZ IEEE ACM portal CiteSeer CSB ncstrl jstor Bookfinder